Rover Drilling Mechanism
Designing the drilling mechanism for the Tel-Aviv University's European Rover Challenge team.

Details
Our rover team began work in 2024 and laid the groundwork for competing in 2026's yearly challenge.
For this year's challenge we were tasked with incorporating a drilling mechanism intended to extract soil samples from 30cm underground.
I was in charge of planning the layout for the electronics and writing the code for the drill, and helped a lot with the printing and assembly.
Technical Details:
- Mission: Autonomously extracting 100g of soil from 30cm depth in under 20 minutes, at a pre-determined location
- Physical Constraints: Must weigh less than 7.5kg, detach from the rover easily, can not interfere with other systems
- Timeframe: Operational prototype by 02/2026, mechanical analysis by 04/2026, final revision by 06/2026



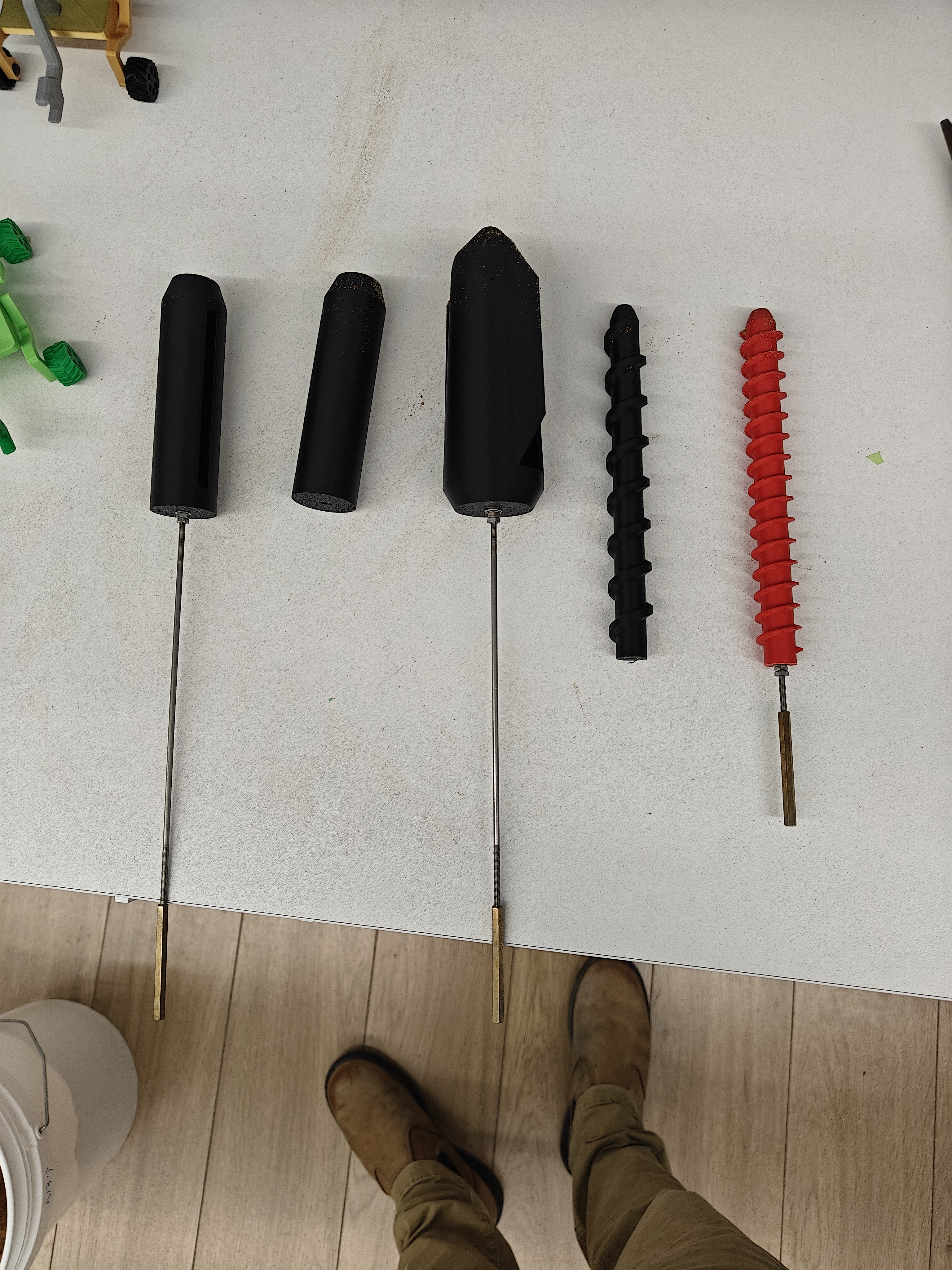
Close-up views of drill bit prototypes.
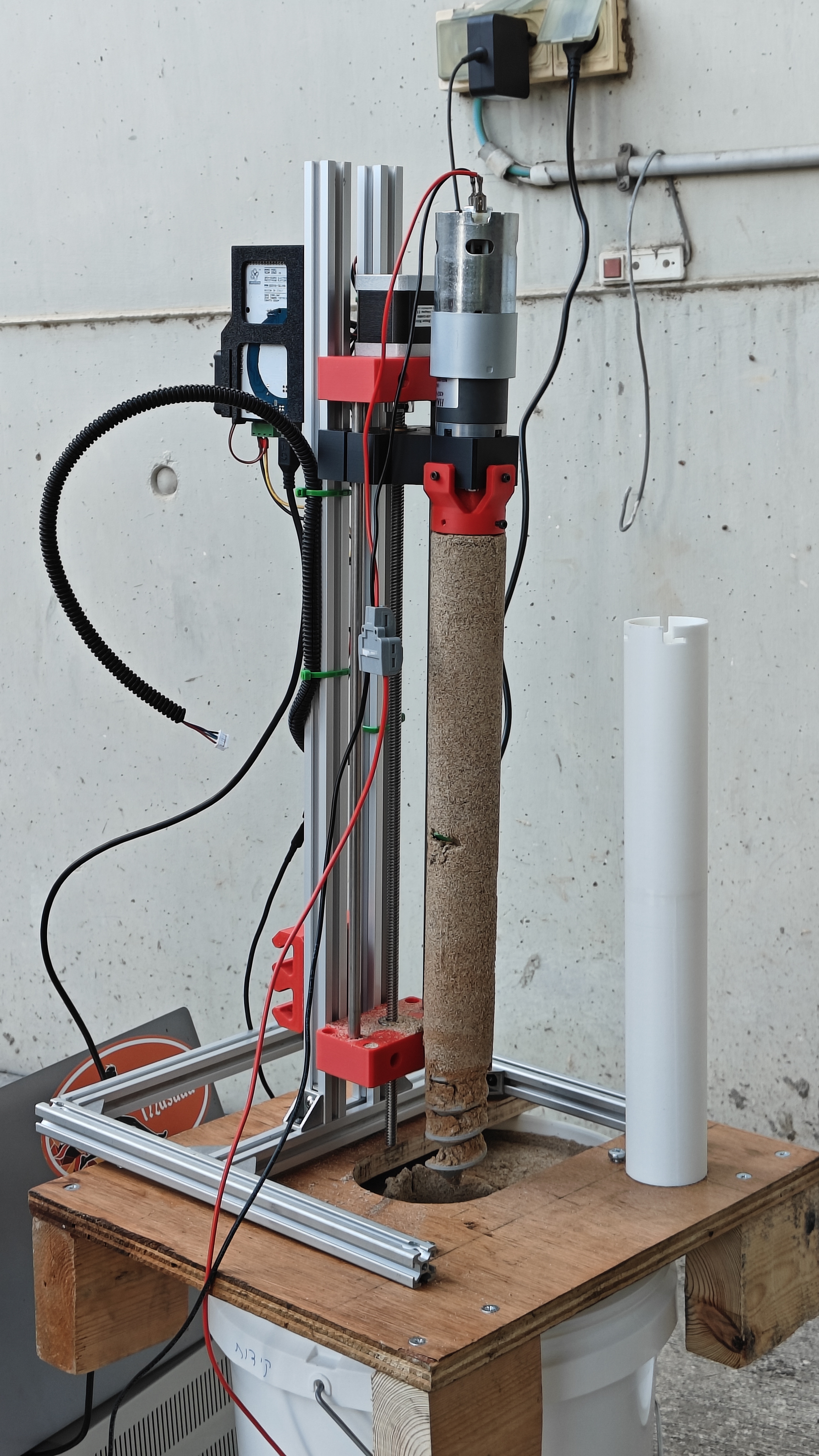
Collected soil after our first successful test.
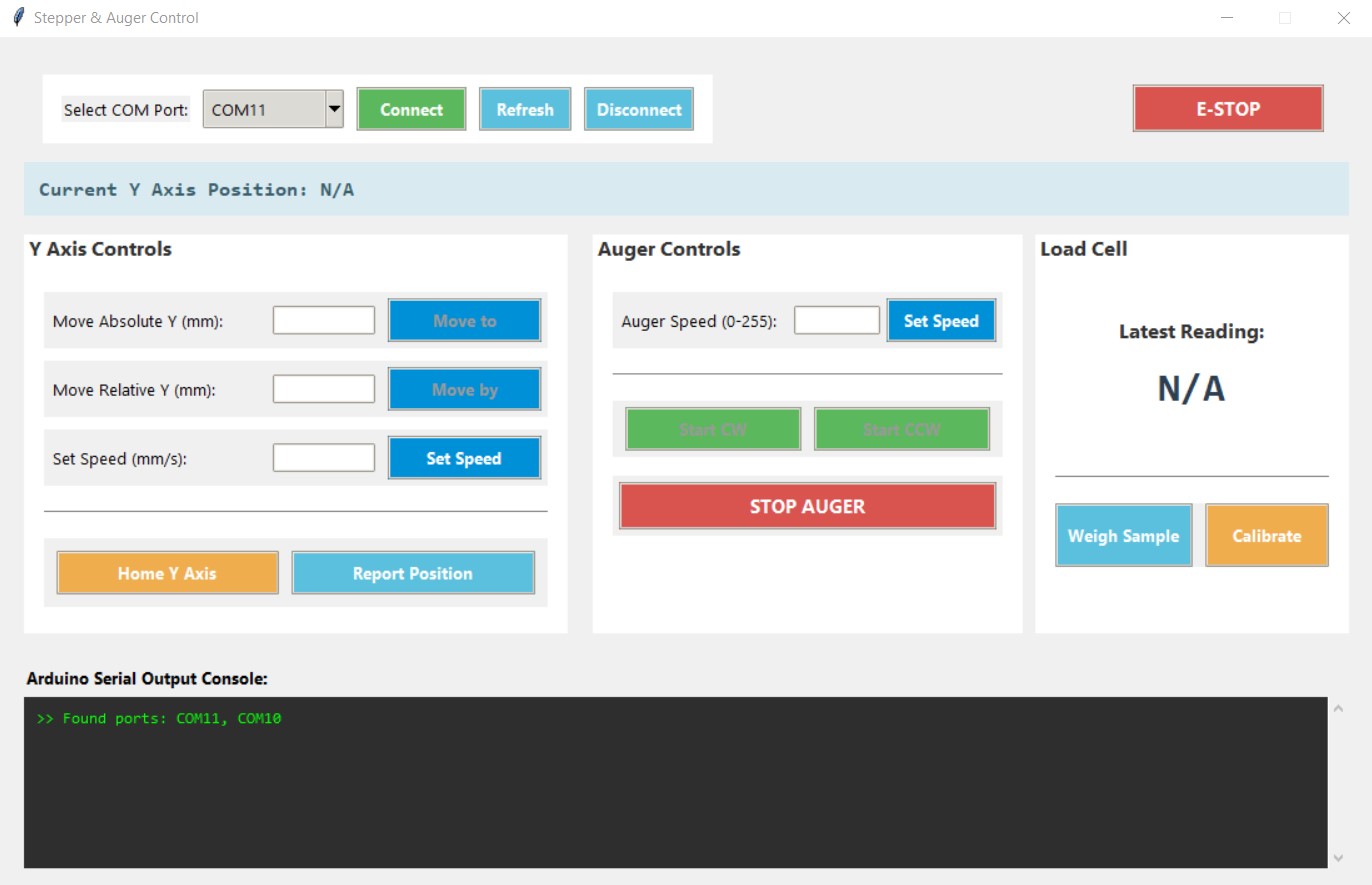
Control program for the drill.